

【施罗德工业】关于管廊巡检,我这有个完美方案想推荐给你
城市综合管廊
囊括了城市内的
燃气、热力、电力、供水、排水、通信等
管线及其附属设施

它深埋地下,默默无闻,保障城市运行
作为市政基础设施的重要组成部分
它在现代化城市发展中
发挥着无可替代的作用

但是,随着城市的发展扩张
综合管廊的长度也逐渐增加、规模不断扩大
传统的综合管廊运营管理问题逐渐凸显
管廊内往往光线不佳、空气不良、结构复杂
给人员巡检带来了不小难度
方案一:人工巡检

能够发现问题并及时解决 | √ |
采集信息不全面、不系统 | × |
受人员技能、经验等影响 | × |
不能及时反馈信息 | × |
有火灾、泄漏等风险 | × |
方案二:监控系统检测

机器自动运行方便快捷 | √ |
信息采集比较全面 | √ |
占用电缆多 | × |
存在监控死角 | × |
需要监控头数量多 | × |
想要快捷方便,减少人工,降低成本
又要系统检测、及时反馈、无死角巡检……
两全其美!
怎么办?
那就请看方案三吧
方案三
施罗德工业集团自主研发的
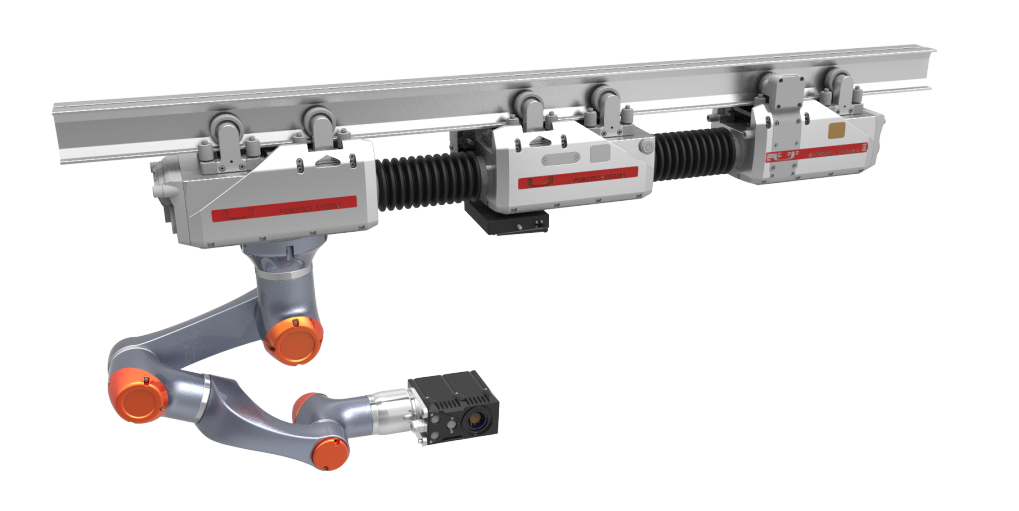
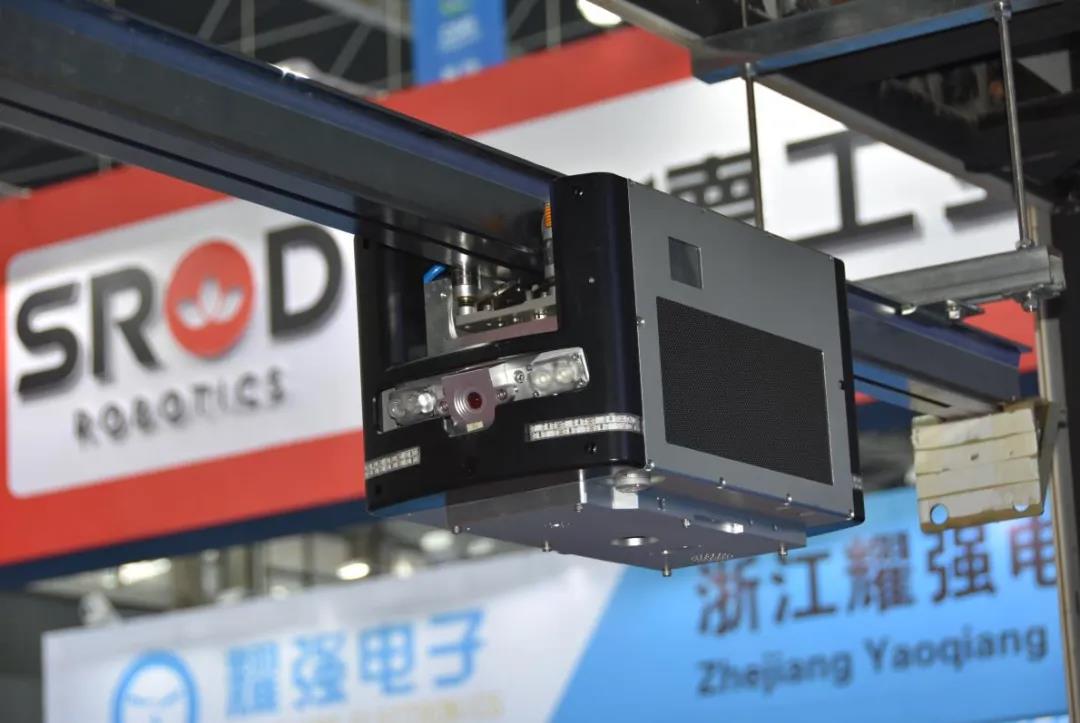
USR全域穿梭机器人
USR全域穿梭机器人
主要针对当前城市综合管廊建设里程日益增加
以及其所衍生出来的:安全巡检、巡逻监控、预警预防、大数据分析等需求。

USR全域穿梭机器人具备“集群化、平台化、自动化和智能化”四大优势特点。
USR全域穿梭机器人彻底抛弃地面上运行的轮式巡检机器人的想法,结合管廊的特点,合理利用管廊上部空间,采用挂轨式布局,极大适应管廊工作条件,定位精度高,具有观测用多关节机械臂,观察范围更广。
系统结构
USR全域穿梭机器人主要由机器人车体系统、路基系统、控制调度平台组成。
其中机器人车体系统又可分为:

按各模块功能,将机器人本体硬件部分又分为三个功能舱:
控制舱——机器人的主控中心,其中集成了位置检测传感器,避障传感器,环境传感系统及通讯系统等,为机器人运行提供安全保障。
动力舱——机器人的能源供给模块,为机器人提供牵引动力,并集成了电源管理系统、自主充电系统等。
搭载舱——机器人搭载高灵活性的多关节机械臂和高清数字影像系统,将管廊内的关键图像、视频信息无死角地完美采集。同时还可搭载灭火装置可以防火灾于未然。
巡检过程

雄安新区市民中心综合管廊USR巡检机器人投入使用
机器人由动力舱提供能源动力,在控制舱的控制下,经动力舱牵引,在综合管廊内铺设好的轨道上进行巡检。
通过平台设置多种巡检模式,巡检中搭载舱机械臂将自动伸出,快速对管廊进行全方位图像采集和传感器数据采集,然后经由通讯系统将采集的实时图像数据上传至后台终端处理、分析,并作出及时预警危险信息,同时和泵站、风机、电力系统等设备联动。
运行当中,环境传感系统会将管廊内温度、湿度、氧气、易燃易爆有毒有害气体数据实时分析并上传后台存储、分析及报警。
技术优势
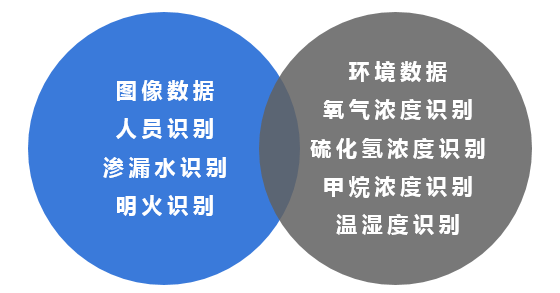
USR全域穿梭机器人,为综合管廊巡检的实际使用而设计,拥有先进的图像识别技术,能够处理多种图像识别任务,如准入人员的识别及追踪,可以使监护者更加有效地在管廊外,对管廊中的人员进行跟踪监护,并可对违规行为进行辅助报警。
大数据联动 分析能力强
机器人还具有环境监测系统的大数据联动功能,机器人在整个管廊中不间断的对环境数据进行采集,并回传给后台数据库,通过对数据的整理和处理,可以对管廊中的温湿度、有毒有害气体等的变化作出分析,绘制变化趋势图,并可预测存在的潜在风险,可帮助监护者及时提醒廊内工作人员潜在危险,或对人员进行疏散。
一体车巡检机器人
模块化设计 应用范围广
采用模块化设计,机器人各舱便于拆装,可以根据需要更换舱室、传感设备甚至是悬挂部件。在更换相应的观测设备后,结合图像识别技术,机器人可以用于监狱、国防重地、危险品仓库、道路、地铁、隧道等各种可使用挂轨式机器人的场景。
多舱位联动 拓展性能好
模块化组合多舱设计,提高机器人的扩展性,结合环境识别,图像识别技术,机器人可以在廊内失火,有毒有害气体泄露等突发险情时,通过无阻碍的机器人专用轨道,挂载机器人用辅助消防设备,救援设备等,对管廊、人员实行第一手救援,并进行险情的第一手控制。由于机器人对水淹、毒害、高温的耐受性,可以身处险情中心汇报最真实的情况,便于救援工作高效展开。
施罗德工业集团致力于为城市提供
完整“地下空间解决方案”

江苏省南京市建邺区江东中路300号







Copyright © 2019-2024, www.dxguanxian.org,all rights reserved 版权所有 廊坊国际管道会展有限公司 冀ICP备15014260号-1